Специализированный транспортный робот на ЧАЭС
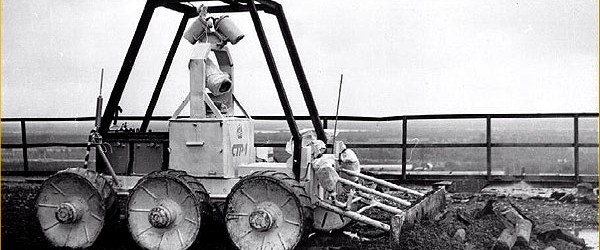
Специализированный транспортный робот (СТР-1) это легендарный и общеизвестный (по кадрам хроник ликвидации аварии) аппарат, принимавший активное участие в очистке крыши ЧАЭС от завалов высокорадиоактивных элементов разрушенного реактора. Робот эксплуатировался при уровнях гамма-фона до 3000 Рентген в час. В некоторых местах (у основания вентиляционной трубы №2) уровни излучения доходили до 10000 Рентген в час.
Опыт применения роботов на ЧАЭС для таких условий показал возможность проведения дезактивации робототехническими средствами, что позволило снизить уровни фона на несколько порядков и уберечь от облучения около 1000 человек, которые надо было бы использовать для выполнения этой работы. СТР разрабатывался десятками научных институтов — ВНИИ АЭС, ИФТП, ВНИИ «Трансмаш», “Пролетарский завод”, НПО “Источник”, НПО “Электронмаш”, ГОИ, НИИ телевидения, Киевским институтом автоматики и многими другими. Примечательно, что для создания концепции СТР были использованы наработки ВНИИ «Трансмаш» по самоходному шасси лунохода. Именно это позволило запустить робота на крышу ЧАЭС уже в конце августа 1986 года.

Фото: Специализированный транспортный робот дезактивирует кровлю ЧАЭС

Фото: робот СТР-1 на кровле ЧАЭС (блок В)
 СТР-1 разрабатывался коллективом инженеров под руководством Кемурджиана Александра Леоновича. Отметим, что коллектив возглавляемый Кемурджианом А. Л. являлся автором создания и эксплуатации на Луне самоходных шасси луноходов, по программе «Луноход-1», в 1970 году, и «Луноход-2» в 1973 году. Ими были созданы аппараты для исследования поверхности Луны, Марса и Венеры.
СТР-1 разрабатывался коллективом инженеров под руководством Кемурджиана Александра Леоновича. Отметим, что коллектив возглавляемый Кемурджианом А. Л. являлся автором создания и эксплуатации на Луне самоходных шасси луноходов, по программе «Луноход-1», в 1970 году, и «Луноход-2» в 1973 году. Ими были созданы аппараты для исследования поверхности Луны, Марса и Венеры.
СТР-1 вобрал в себя принципиальные решения от лунохода. В частности для создания СТР использовали мотор-колеса имеющие индивидуальные приводы. В качестве источника питания использовались аккумуляторы, которые необходимо было специально подзаряжать от специальных устройств установленных на транспортной тележке.
Опыт этой команды инженеров был крайне важен создания робота для Чернобыля. Непосредственная подготовка роботов к работе, наладка, регулировка систем проводилась непосредственно в г Чернобыль. Для этих целей использовали брошенные цеха Чернобыльской ремонтно-эксплуатационной базы флота.




Фото – Робот СТР-1 выполнявший работы на кровле ЧАЭС
Техническая характеристика и компоненты робота
Технические характеристики робота:
- Общий вес робота – 1100 килограмм,
- Скорость движения – до 1 км/час,
- Электропитание от аккумуляторов. СТР-1 оборудовался двумя серебряно-цинковыми батареями.
Контрукция робота содержит три основных компонента, которые, кстати, разрабатывались автономно друг от друга:
- Радиотелевизионный комплекс. Разработан ИФТП и другими иститутами;
- Самоходное шасси (СШ) в совокупности со всеми приборами обеспечивающими движение робота. Разработано во ВНИИ «Трансмаш»;
- Рабочий орган — бульдозерный отвал с механизмом подъема-опускания. Разработан ВНИИ АЭС.

СТР-1 — принциальная схема робота
Робот — Принципиальная схема специализированного транспортного робота
Робот создан из сплавов легких металлов (титан). Визуализация окружающего пространства осуществлялась с помощью телевизионных камер установленных, как на самом роботе, так и на мачтах установленных в месте выполнения работ (на кровле ЧАЭС, возле ВТ-2 и т.д.). В литературе иногда встречается название робота СТР-1 — «Клин-2». Такое название роботу дали конструкторы ВНИИ «ТРАНСМАШ», которые одновременно с СТР-1 разрабатывали тяжелый роботизированный комплекс «Клин-1».
Управление роботом осуществлялось с помощью радиоканала, что существенно упрощало использование робота на кровле ЧАЭС. Отсутствовала проблема обращения с кабелями, которые бы загрязнялись радиоактивными веществами и снижали маневренность робота. Кстати сказать, по существующей информации один из роботов-разведчиков, который использовался для изучения реактора был утрачен, поскольку запутался в собственном кабеле и его не удалось извлечь обратно. Робот и сейчас находится в одном из помещений чернобыльского Саркофага. Хотя автономное энергоснабжение имеет и свои существенные недостатки – аккумуляторные батареи имели небольшой ресурс, а работа в местах с высоким радиационным фоном приводила к быстрому их разряду.
В комплект специализированного транспортного робота поставленного на ЧАЭС в 1986 году входило непосредственно два робота СТР-1, специальная люлька для доставки робота на место проведения работ (для этого использовали вертолет Ми-8 и кран “Libcher”), зарядно-разрядное устройство, пульт управления. Готовя робота к работе на ЧАЭС, конструкторы разработали специальное технологическое оборудования для дезактивации колес, которое также было поставлено в составе робототехнического комплекса.
По опубликованным данным производительность СТР-1 была не высокой. Робот проработал в общей сложности не более 10 часов и очистил около 20 кв. метров крыши.
По данным других источников СТР-1 позволил очистить кровлю ЧАЭС от 90 тон высокоактивных материалов, благодаря чему уровни радиационного фона удалось снизить в 20 раз.

Фото: Робототехнический комплекс на площадке хранения

Фото: СТР-1 на площадке хранения через 20 лет после аварии
Литература о роботах
- Создание и использование радиоуправляемых транспортных роботов СТР для работы на Чернобыльской АЭС. Кемурджиан А.Л., Комиссаров В.И., Маленков М.И., Сологуб П.С. и др. Тезисы докладов на IV Всесоюзном совещании по робототехническим системам. Ч. II. Киев. 1987. C. 265.
- Опыт разработки и эксплуатации робототехнического комплекса СТР-1 при очистке кровель ЧАЭС в 1986 году / М.И. Маленков, А.Л. Кемурджиан ОАО ВНИИТРАНСМАШ, Санкт-Петербург
- Космонавтика XXI века. Планетоходы ВНИИТРАНСМАШ. Болховитинов И. С., Громов В.В., Кемурджиан А.А., Сологуб П.С, Ж-ал Земля и Вселенная. 1991. — №5